
November 2022 – Ausgabe 40
Digitalisierte Schulterendoprothetik – von der Planung zur Navigation

Dr. med. Sven Lichtenberg
Zum Arztprofil

Prof. Dr. med. Marc Schnetzke
Zum Arztprofil

Prof. Dr. med. Markus Loew
Zum Arztprofil
Schlüsselwörter: Schulterendoprothetik, Glenoid, Glenoidpositionierung, Navigation
Im Bereich der Hüft- und Knieendoprothetik wird schon seit Jahrzehnten über die Möglichkeiten der intraoperativen Navigation und Robotik mit stark unterschiedlichen Erfolgen berichtet. In der Schulterendoprothetik ist und bleibt die Versorgung des Glenoids die Schwachstelle in der optimalen Versorgung dieses hochkomplexen Gelenks.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
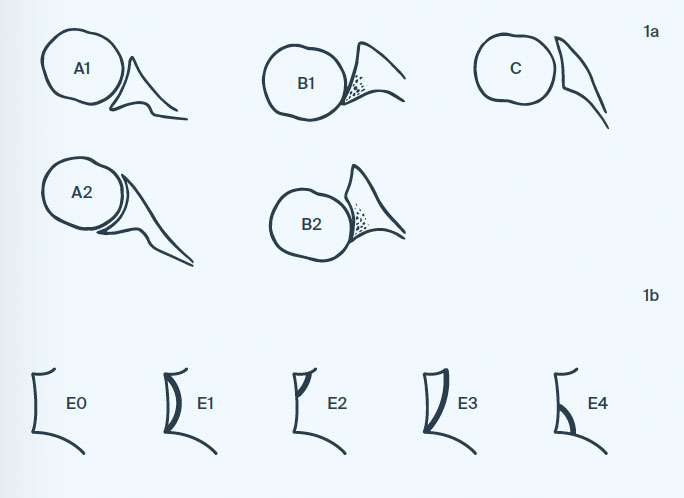
In der anatomischen Prothetik, die ja ihre Hauptindikation bei der Omarthrose mit intakter Rotatorenmanschette hat, bekommen es die Operierenden häufig mit deutlichen Destruktionen der Gelenkpfanne zu tun. Die bekannte Klassifikation des arthrotischen Glenoids nach Walch (12) beschreibt diese schwierigen Veränderungen. Während bei den Typen A1 und A2 in der Regel eine konzentrische Veränderung besteht, tritt bei den Typen B1, B2 und B3 ein exzentrischer Verbrauch des Knochens auf, während Typ C das dysplastische Glenoid beschreibt (Abb. 1a). Gleichzeitig beobachtet man bei der Omarthrose eine Entrundung des Humeruskopfes und dessen posteriore Translation (12) durch Verkürzung der ventralen Strukturen. Diese Deformitäten sicher zu beherrschen und zu korrigieren, ist technisch anspruchsvoll, aber auch zwingend notwendig, wenn man ein gutes funktionelles Ergebnis und eine lange Standzeit erreichen will.
In der inversen Endoprothetik stellt häufig nicht das native Glenoid die Herausforderung dar, sondern das bereits zuvor behandelte Glenoid. Die primäre Implantation einer inversen Glenoidkomponente sollte zwar auch achsgerecht erfolgen, sie verzeiht aber eher einmal Abweichungen. Schwierig wird es vor allem bei Prothesenwechseln von anatomisch auf invers oder von invers auf invers, wenn es zu größeren Knochendefekten am Glenoid gekommen ist, oder bei periprothetischen Infekten. Bei rheumatischen Patientinnen bzw. Patienten und bei fortgeschrittener Defektarthropathie besteht in der Regel ein superiorer Verbrauch des Glenoids, welcher nach Favard (Abb. 1b) klassifiziert wird (6). Hier kommt es regelhaft zu Veränderungen, die mit einer superioren Inklination verbunden sind und somit einen Knochenverbrauch nach superior beinhalten.
Planung der Glenoidkomponente
Neben den anatomischen Herausforde- rungen besteht eine weitere Schwierigkeit bei der Implantation einer Schulterendoprothese in der chirurgischen Darstellung der anatomischen Strukturen und vor allem deren Lagebeziehung im Raum. Das gut dargestellte Glenoid kann durch unterschiedliche Lagerung der/des Patientin/Patienten oder der Skapula der/des Patientin/Patienten im Raum einen völlig anderen als den anatomischen Retroversionswinkel erahnen lassen. Diese starke Unsicherheit auch bei erfahrenen Operierenden hat in den letzten zehn Jahren zu einer Verbesse- rung der Planungsfähigkeit des Endoprotheseneingriffs geführt.
So gelten folgende Regeln bei der Implantation einer Schulterprothese:
- Humeral sollte das Rotationszentrum optimal rekonstruiert werden
- 80-prozentige Auflage der Glenoidkomponentenrückfläche auf der gefrästen Knochenfläche
- Subscapularis-Sehne zur Einheilung bringen
Studien zufolge beeinflusst eine pathologische Retroversion der Glenoidkomponente eine frühzeitige Lockerung der Komponente, auch eine Schwächung des subchondralen Knochens durch exzessives Fräsen am Glenoid führt zu früher Lockerung (13). Es wurde gezeigt, dass die Tiefe des subchondralen Knochens bei 2,5 Millimetern in konzentrischen und 3,5 Millimetern in exzentrischen Glenoiden liegt. Ein vermehrtes Fräsen über diese 3,5 Millimeter hinaus erwies sich als diametral zur Haltbarkeit der Komponenten. Deshalb wird heute eine maximale Frästiefe von 3,5 Millimetern empfohlen (11).
Planung am Humeruskopf
Die Planung am Humeruskopf steckt noch in den Kinderschuhen und nur einige Firmen bieten dazu Lösungen an. Verbreiteter ist inzwischen, dass nahezu alle Prothesenanbieter eine Planungssoftware offerieren mit unterschiedlichen Konzepten zu deren Umsetzung am Patienten bzw. an der Patientin.
CT als Standard zu OP-Planung
Zur Nutzung der verschiedenen Systeme wird ein CT gefordert, das in max. Ein- Millimeter-Schnitten (mind. 0,3 mm) gefahren wird und die gesamte Skapula abbildet. Ferner muss es sich um rein axiale Schichten handeln (0°-Gantry-Neigung). Die Firmen stellen ein entsprechendes Protokoll für die Radiologie zur Verfügung. Wichtig ist jedoch, eine/einen Radiologin/Radiologen zu haben, die/der sich mit den Anforderungen auskennt und diese auch umsetzt.
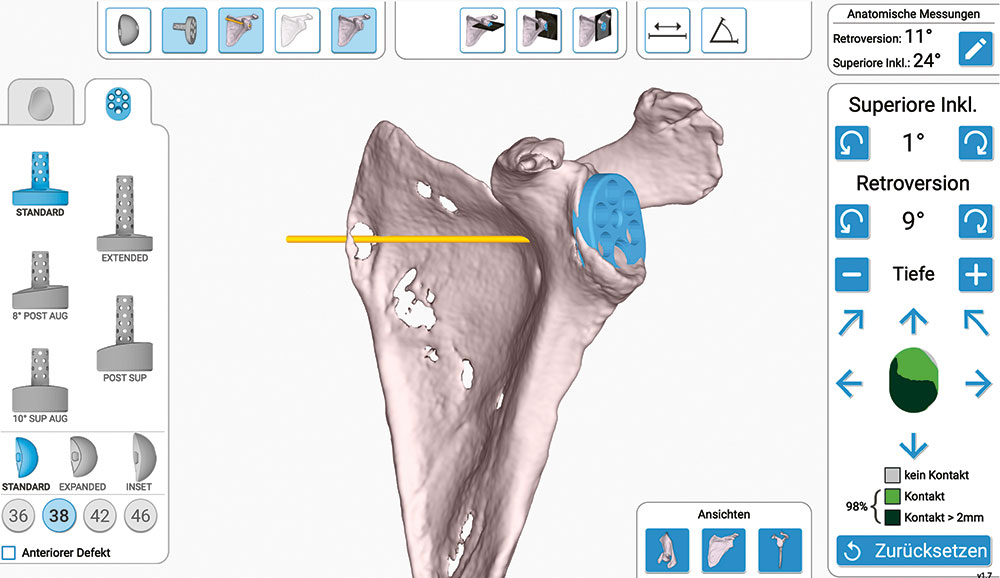
Je nach Software erfolgt zunächst eine Vermessung der Skapula mit Bestimmung des Retroversions- und Inklinationswinkels des Glenoids. Die Software bietet dann entsprechende Implantate zum Einsetzen in dieses Glenoid an, man kann wählen zwischen verschiedenen Größen, Arten (anatomisch/invers) und Augmenten (half wedge/full wedge). Mit der Software wird die optimale Position gefunden, hinsichtlich Zentrierung, Implantationstiefe, Retroversion und Inklination. Während der Operation kann angezeigt werden, was die jeweilige Position für die Implantation hinsichtlich des Fräsens und der Änderung des Retroversionswinkels bedeutet. Wenn man die Option „nur Planung“ wählt, kann man dann mithilfe des normalen Instrumentariums diese geplanten Änderungen und Vorgaben umsetzen.
Bei Unsicherheiten kann je nach Firma eine Planung durch geschultes Personal der Firma erfolgen. Diese wird dann nach einer Bearbeitungszeit von 1-3 Werktagen zur Verfügung gestellt und kann von der Operateurin oder vom Operateur noch in geringem Umfang verändert werden. Letztlich muss die Operateurin oder der Operateur die Planung bestätigen.
Dann können verschiedene Transferinstrumente bestellt werden. Entweder man erhält ein 3D-Surrogat aus dem 3D-Drucker, mithilfe dessen die korrekte Implantation simuliert werden kann, oder man erhält ein spezielles Instrument, mit dessen Hilfe die optimale Position des zentralen K-Drahtes zum Bearbeiten der Pfanne platziert wird. Die weitere Implantation erfolgt dann, nachdem der K-Draht sitzt, wie gewohnt.
Eine intraoperative Navigation wird eben- falls angeboten. Über ein Trackersystem werden die knöchernen Landmarken kalibriert und festgelegt. Nun kann man über dieses System gesteuert und kontrolliert den K-Draht setzen, aber auch das Befräsen des Glenoids, die Zapfen- und Schraubenbohrungen und -platzierungen genauestens überprüfen lassen. In der Regel werden die Tracker am Korakoid befestigt und mit einem Lasersystem entsprechend referenziert.
Im Folgenden werden nun exemplarisch die verschiedenen Möglichkeiten genauer beschrieben
CT-Planung
Das optimal erstellte CT wird in die Software eingelesen. Je nach Hersteller kann man dann eine reine Planung selbst durchführen oder sich vom Hersteller eine Planung erstellen lassen.
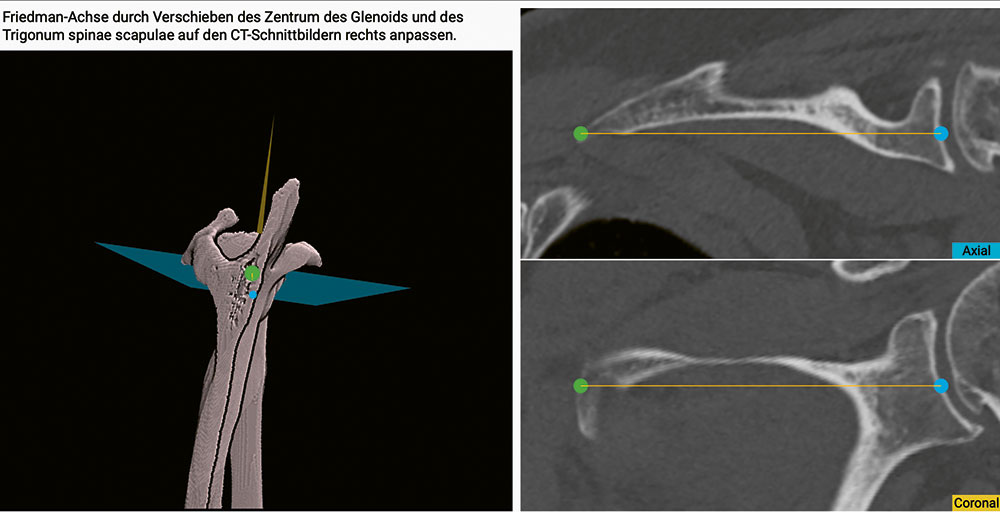
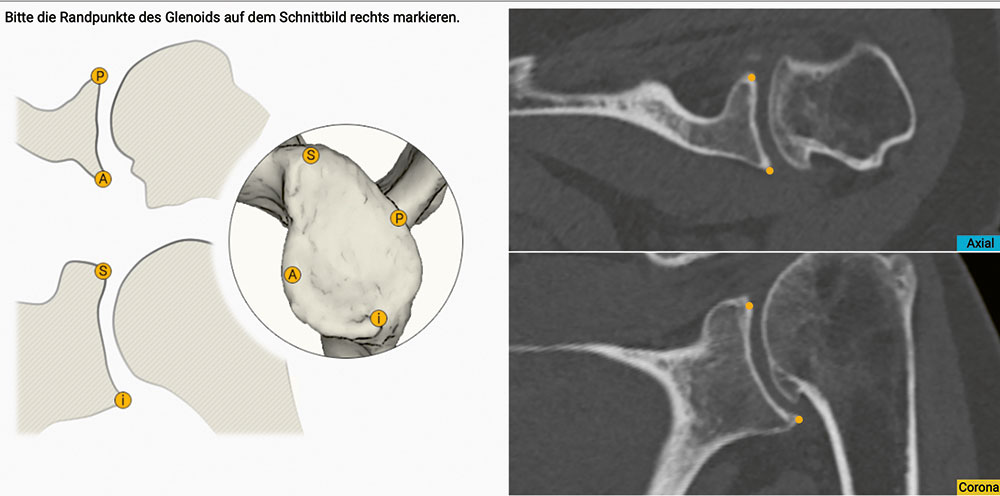
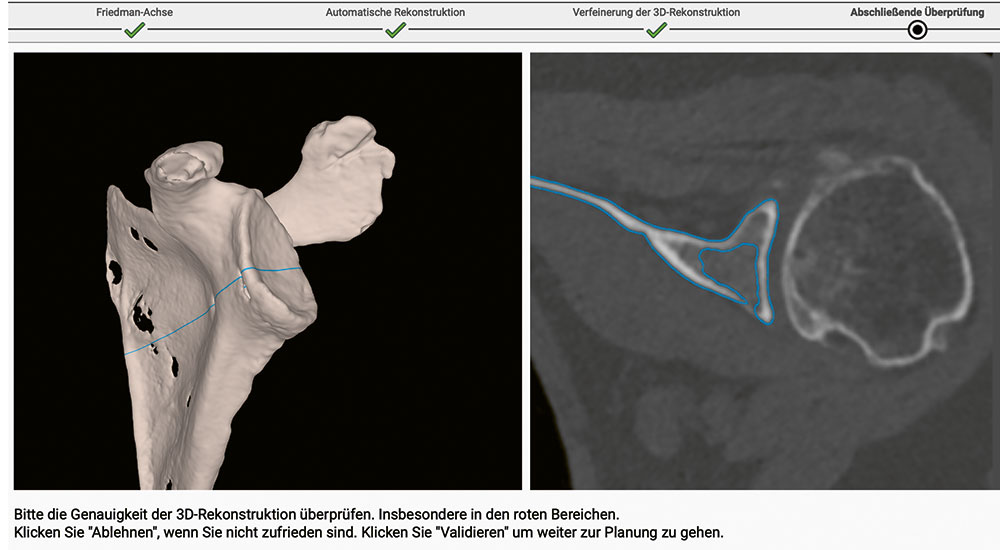
Zunächst werden verschiedene Referenzpunkte im CT bestimmt. Dies sind zum einen das Trigonum scapulae und die Glenoidmitte (Abb. 2) sowie im nächsten Schritt die Randpunkte des Glenoids (Abb. 3). Daraus entsteht eine 3D-Rekonstruktion der Skapula (Abb. 4). Nach Validierung der Rekonstruktion gelangt man zur „Spielwiese“ der/des Operierenden, wo nun nach den eigenen Wünschen die Implantate und deren Lage variiert werden können (Abb. 5). Man bekommt nun eine Berechnung der Retroversion und der Inklination des Glenoids.
Nach Erreichen der optimalen Kombination aus Implantat und Position wird diese gespeichert und man kann die Planung im OP durch Hilfsinstrumente umsetzen. Alternativ kann man sich mit dem gezeigten System auch eine Planung mit intra- operativer Navigation erstellen lassen.
Transferinstrument
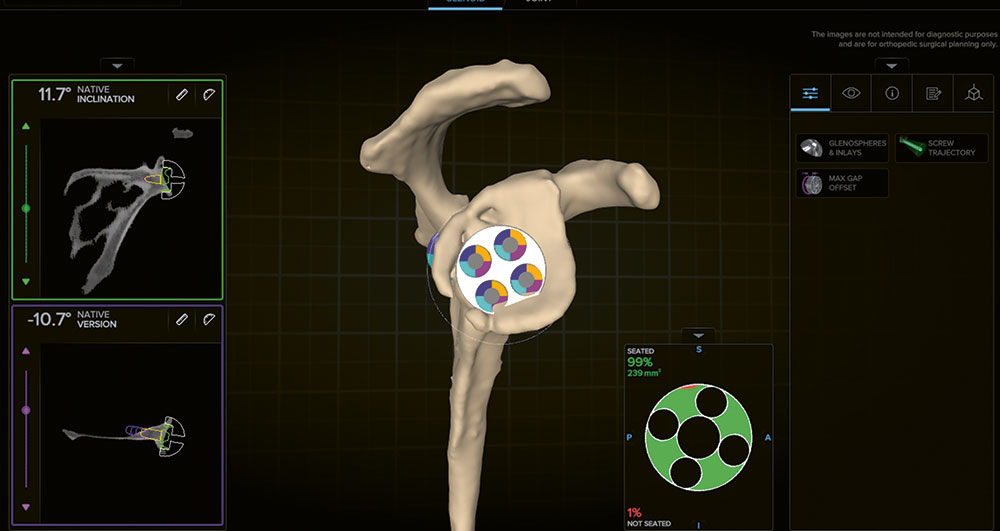
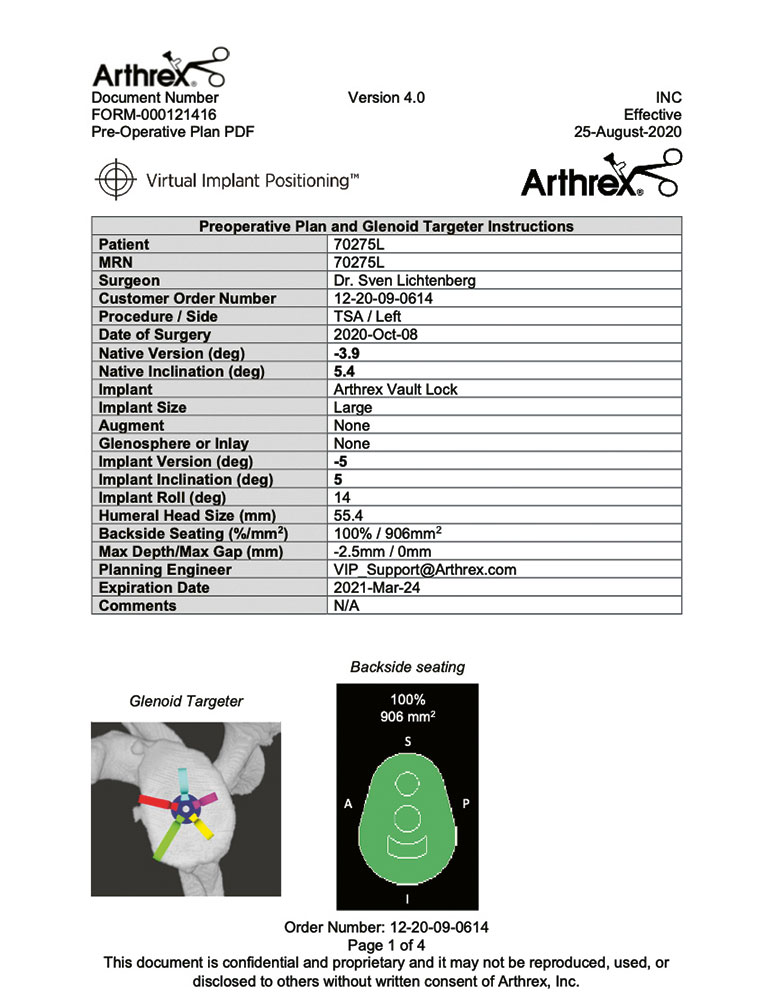
Eine andere Lösung ist das Einsenden der anonymisierten CT-Daten an den Hersteller. Nach entsprechender Rekonstruktion der Skapula schlagen dessen Mitarbeitende ein Implantat und eine entsprechende Position vor, die dann vor der Operation noch überprüft und validiert werden muss. Hierbei können noch Änderungen vorgenommen werden, die dann in die abschließende Planung umgesetzt werden (Abb. 6). Anhand dieser Daten erfolgt die Festlegung der „Fingerpositionen“ eines 5D-Kalibrators, mit dessen Hilfe die perfekte Position des zentralen Kirschnerdrahtes festgelegt wird (Abb. 7).
Navigation
Nach der Planung des Eingriffs wird das Ergebnis über die Software des Unternehmens an den Operateur geschickt. Dieser lädt die Dateien auf einen USB-Datenträger und die Daten werden so in das Navigationsgerät eingelesen.
Die Operation verläuft nun zunächst wie gewohnt mit Präparation des Humerus, Humeruskopfresektion und Darstellung des Glenoids.
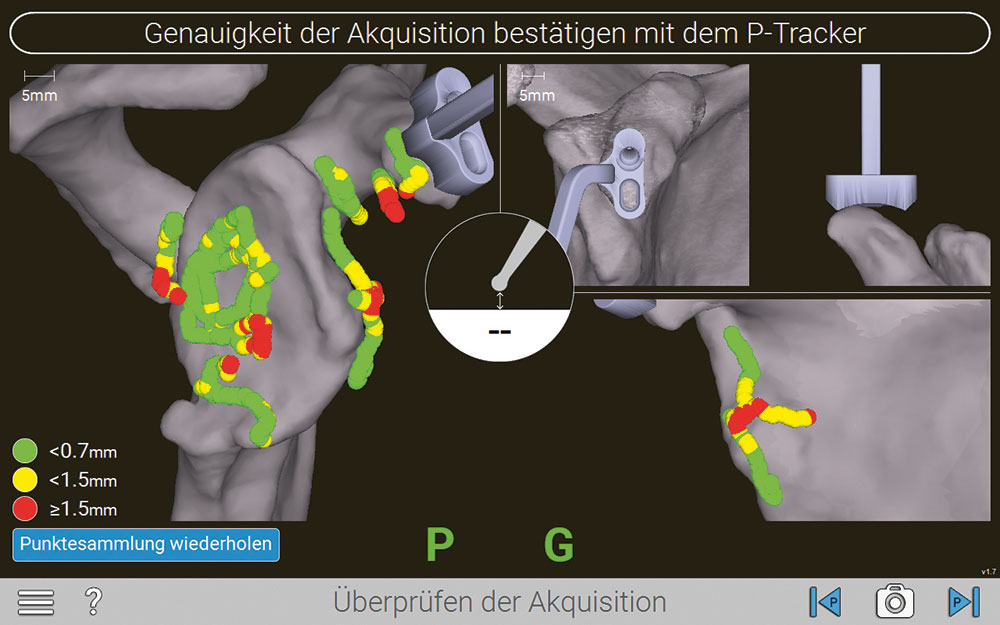
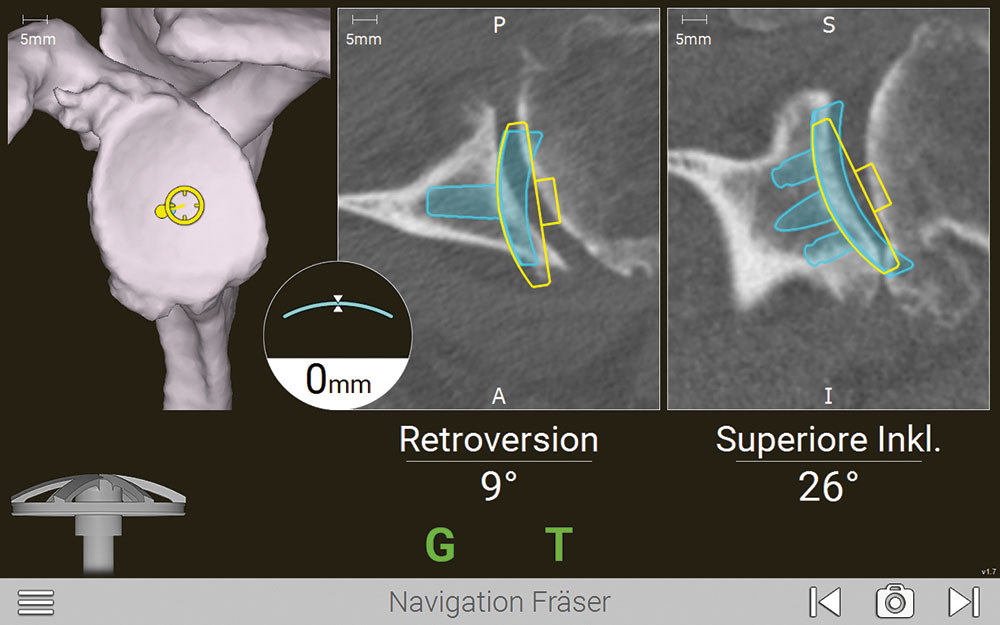
Dann wird der Tracker auf dem Korakoid platziert. Zwei weitere Tracker werden eingelesen. Dann muss die/der Operierende verschiedene Referenzpunkte markieren. Danach zeigt das System, wie gut die Referenzpunkte getroffen wurden (Abb. 8) Nun wird der Eintrittspunkt in das Glenoid, wie auch die richtige Version und Inklination ähnlich eines „Kimme und Korn“-Systems eingestellt und gebohrt (Abb. 9). Nun kann über den eingebrachten K-Draht das Fräsen der Pfanne vorgenommen werden (Abb. 10).
Der definitive Einbau der Glenoidkomponente erfolgt durch Press-fit-Einschlagen des Metalbacks, nachdem zuvor auch das Zapfenloch navigiert gebohrt wurde. Zusätzliche Schrauben können ebenfalls navigiert platziert werden.
Abschließend wird die Humeruskomponente implantiert.
Ergebnisse
In-vitro-Studien konnten zeigen, dass die Präzision der Glenoidpositionierung sich signifikant verbessert. Ianotti (7) bewies dies mit seiner Studie aus dem Jahr 2014. Inwieweit sich diese erhöhte Präzision auf klinische Ergebnisse oder auf die Standzeiten der Prothesen auswirkt, ist Schwerpunkt der klinischen Forschung und noch nicht belegt.