
Mai 2026 – Ausgabe 47
Kasuistik: Schulterendoprothetik mit moderner Planung und Navigation

Prof. Dr. med. Marc Schnetzke
Zum Arztprofil

Prof. Dr. med. Markus Loew
Zum Arztprofil

Dr. med. Sven Lichtenberg
Zum Arztprofil
Zur Ergänzung der Übersicht werden in diesem Beitrag anhand von zwei Fallbeispielen die Implantation von anatomischen Schulterprothesen mithilfe von 3D-Planung und Navigation sowie die Umsetzung über ein patientenspezifisches Transferinstrument dargestellt.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Fallbeispiel 1 – anatomische Schulterprothese mit 3D-Planung und Umsetzung über ein Transferinstrument
Ein 54-jähriger Patient stellte sich mit langjährigen, zunehmend belastenden Schulterschmerzen vor. Besonders Drehbewegungen des Arms waren stark eingeschränkt. Physiotherapie, Injektionen und Medikamente brachten keine Linderung mehr. Die Röntgenbilder zeigten typische Veränderungen eines B2-Glenoids mit deutlicher Arthrose.
Vorbereitende Planung:
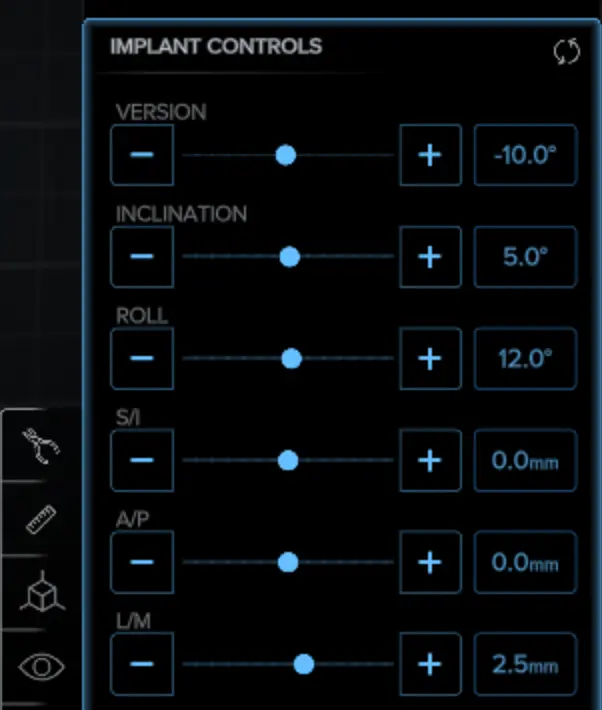
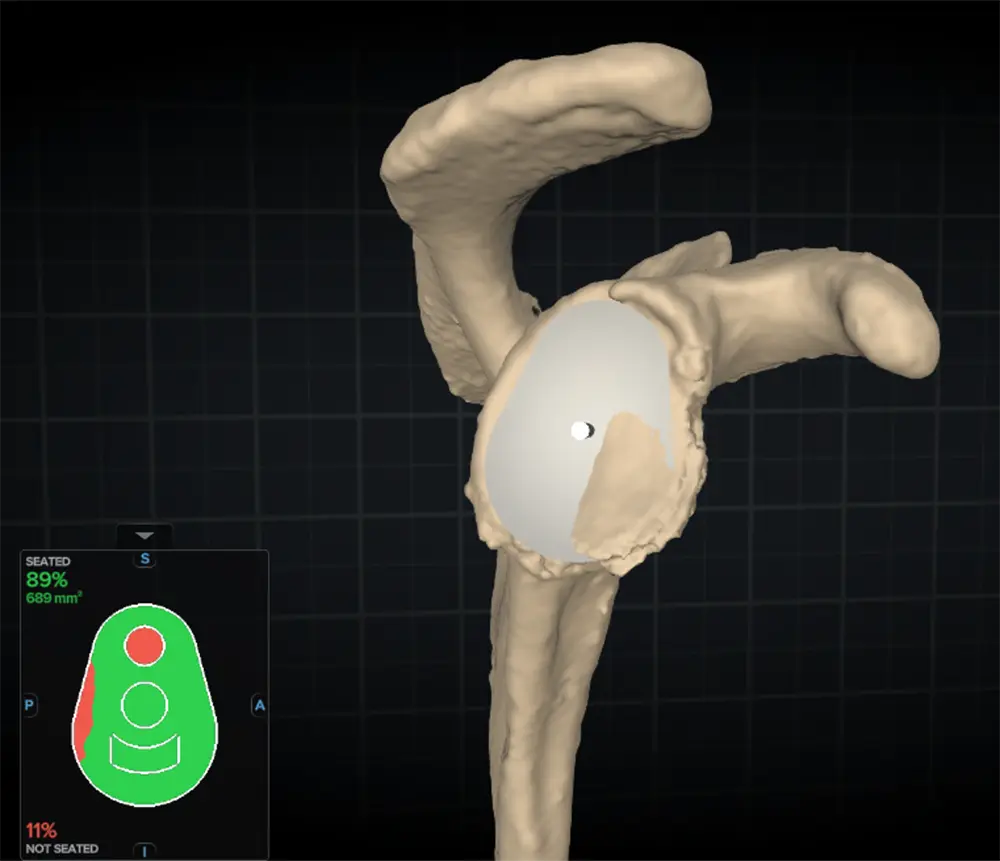
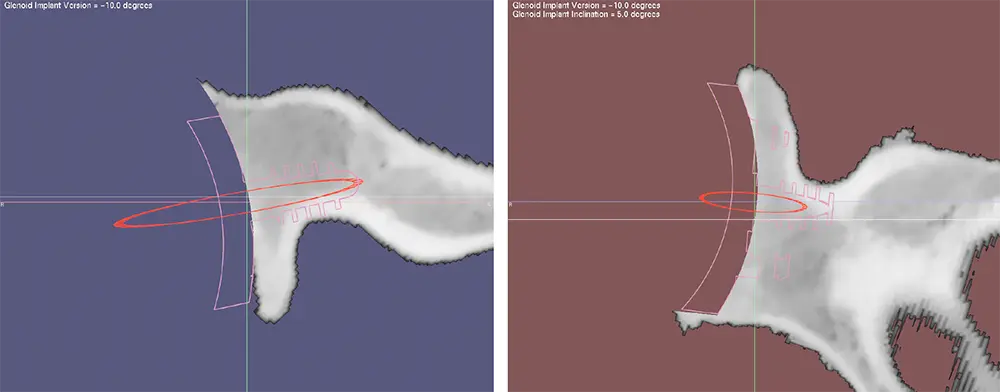
Zur Operationsvorbereitung wurde ein CT durchgeführt. Die VIP-Software ermittelte eine Retroversion von 22,9° und eine Inklination von 14,9°. Aus den CT-Daten wurde ein 3D‑Modell erstellt, das der Operateur virtuell analysieren und durch das er exakt die optimale Implantatposition festlegen konnte.
Die Software zeigt nicht nur die geplante Position, sondern auch die Knochenabdeckung und die notwendige Frästiefe.
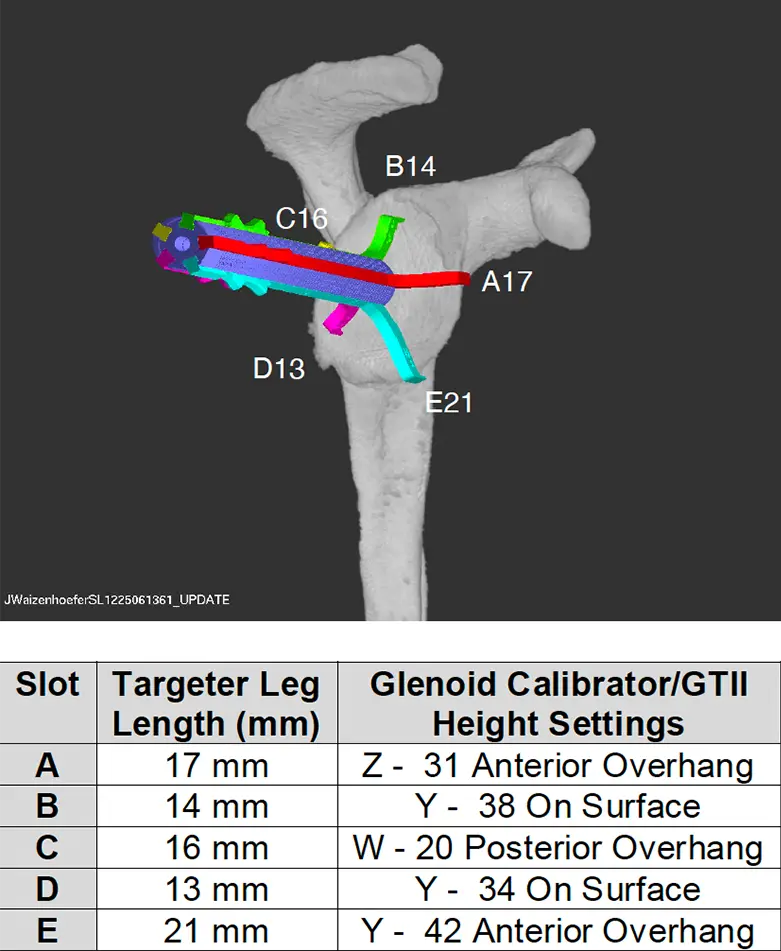
Für die Umsetzung im OP stellte die Firma ein patientenspezifisches Transferinstrument (5D‑Kalibrator) her.
Intraoperative Umsetzung:
Nach Freilegung des Glenoids ohne frühzeitiges Abtragen von Knochen, um die CT‑Form zu erhalten, wurde der Kalibrator exakt wie geplant auf die Gelenkpfanne gesetzt. Durch ihn konnte der zentrale Führungsdraht präzise im geplanten Winkel platziert werden. Danach erfolgten Fräsung und Implantation.
Das postoperative Röntgenbild zeigt die planungstreue Positionierung.
Fallbeispiel 2 – anatomische Schulterprothese mit intraoperativer Navigation
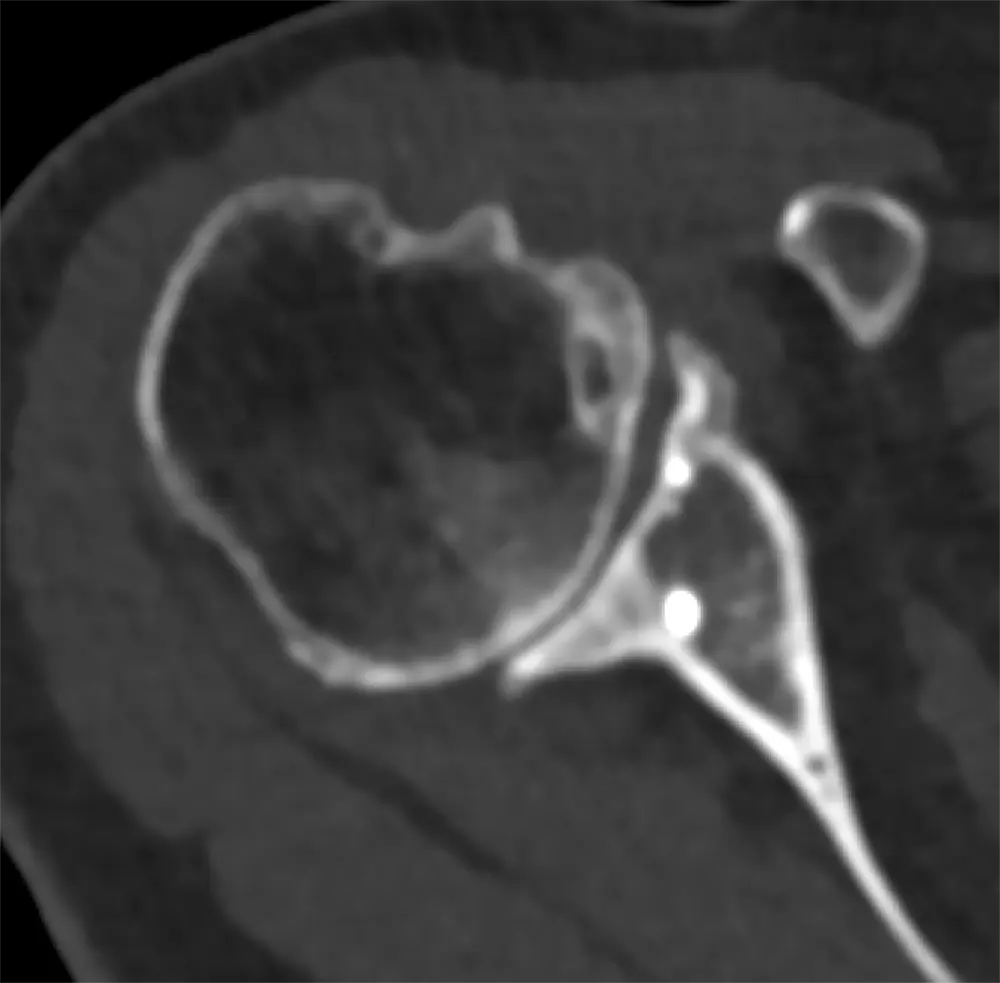
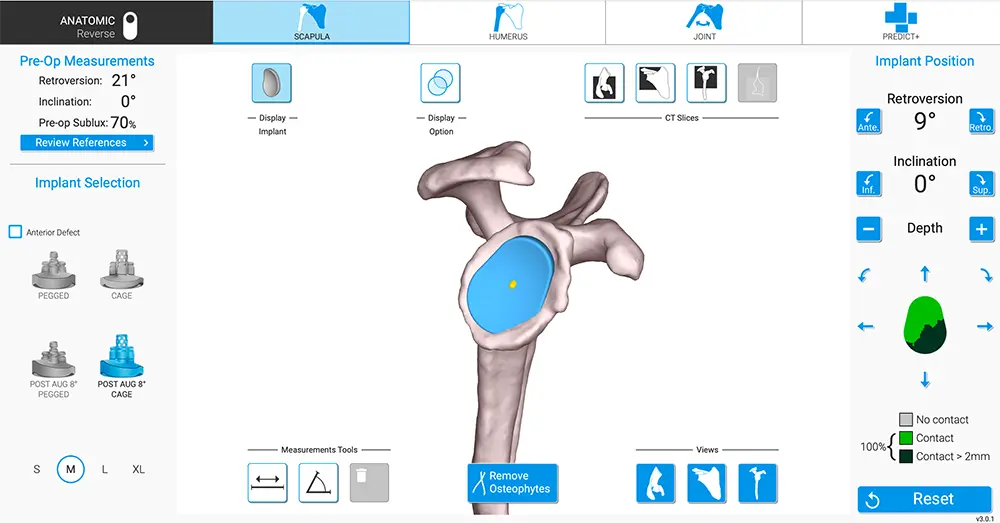
Eine 55‑jährige Patientin mit fortgeschrittener Arthrose und B3-Glenoiddeformität stellte sich vor. Die CT zeigte eine Retroversion von 21°. Die Rotatorenmanschette war intakt, weshalb eine anatomische Prothese infrage kam.
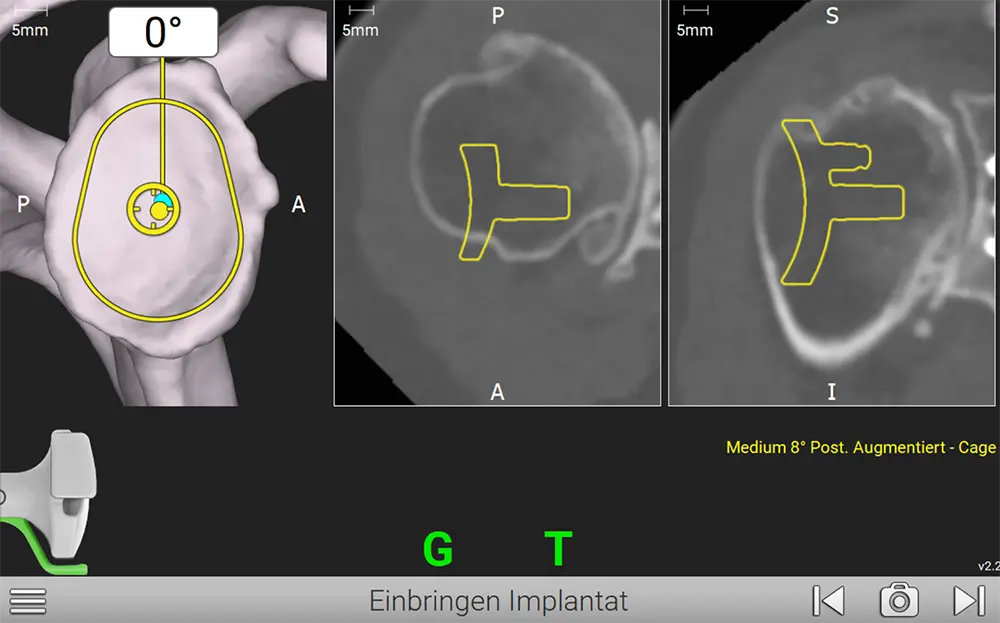
Auch hier wurde ein 3D‑Modell erstellt, und die endgültige Planung wurde festgelegt: Korrektur auf 9° Retroversion und zusätzlich ein dorsales Augment von 8°.
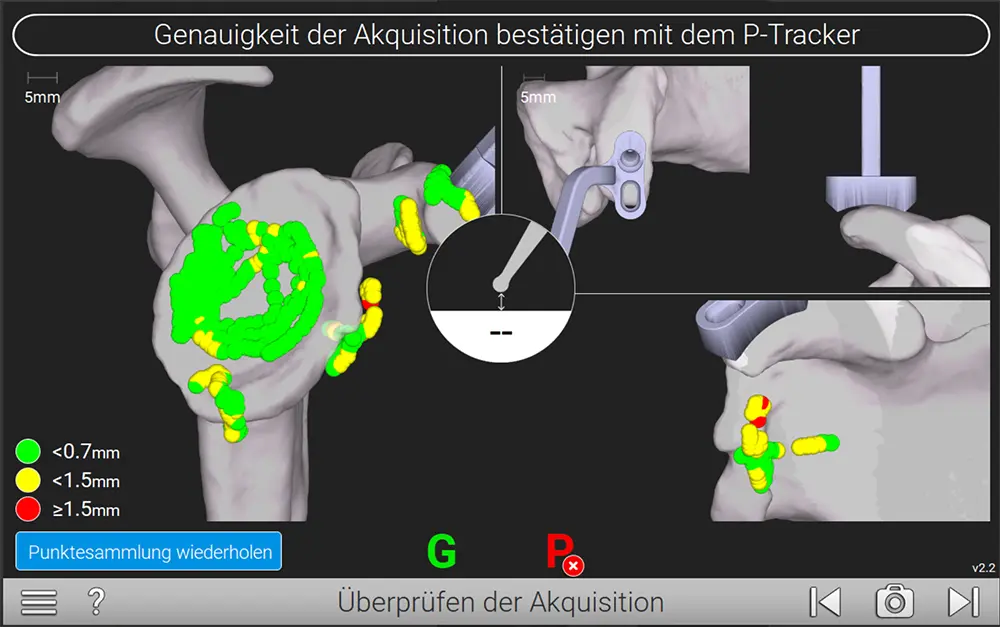
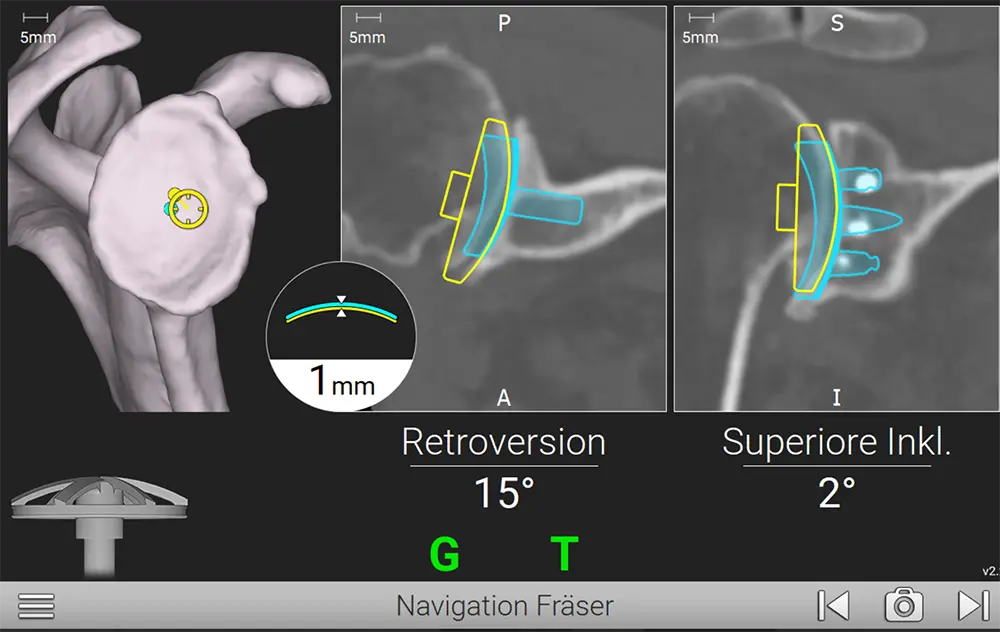
Nach Freilegung des Glenoids wurden Tracker am Coracoid, Glenoid und Instrument befestigt. Dann wurden anatomische Landmarken eingelesen. Die Navigation überprüft die Übereinstimmung zwischen CT‑Modell und realer Anatomie. Nur bei ausreichender Genauigkeit (grün/gelb)wird fortgefahren.
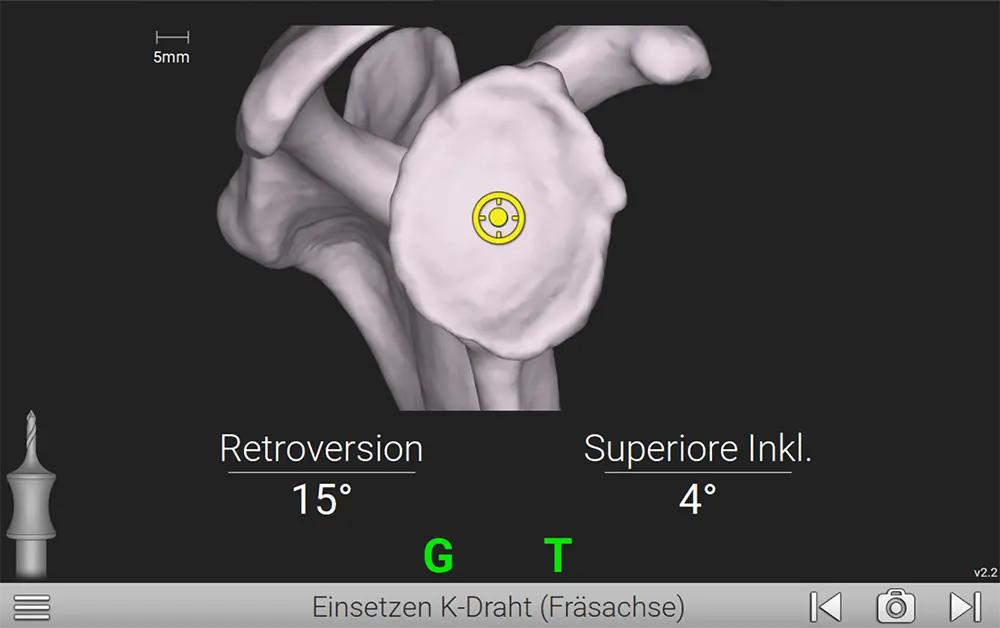
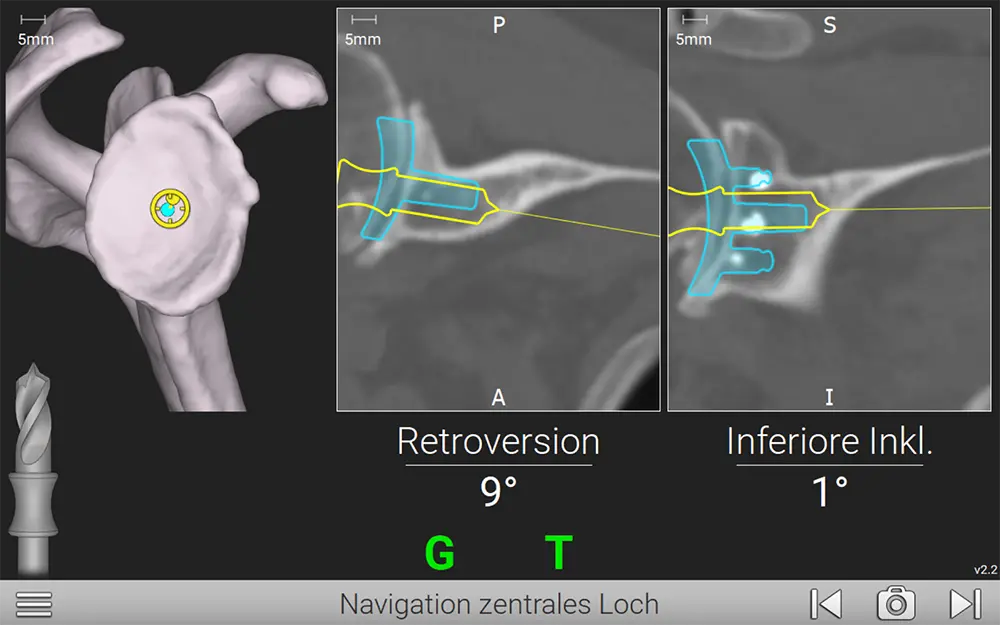
Der zentrale Führungsdraht wurde exakt entlang der geplanten Richtung gesetzt.
Während des Fräsens zeigte das System die aktuelle und geplante Richtung sowie die optimale Tiefe an. Am Ende wurde die Glenoidkomponente planungstreu implantiert.
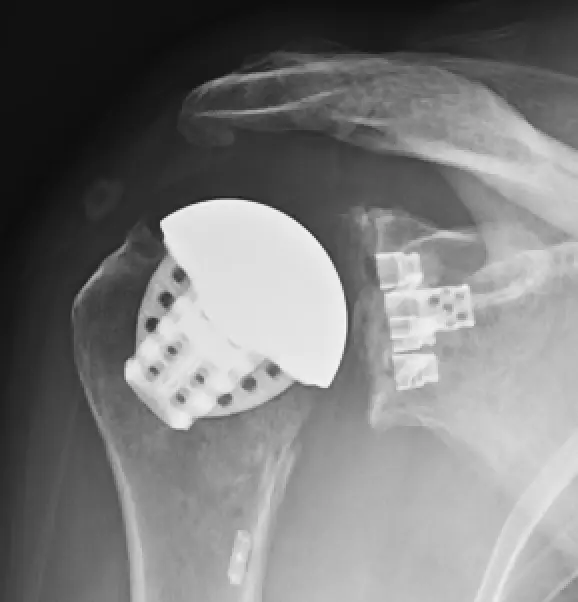
Das postoperative Bild bestätigte die ideale Platzierung.
Beide Kasuistiken zeigen die planungstreue Positionierung und exakte Platzierung der anatomischen Schulterprothesen bei beiden Patienten mit komplexer Glenoidmorphologie.