
Mai 2026 – Ausgabe 47
Intraoperative Navigation in der Schulterendoprothetik – Potenziale, Evidenz und klinische Anwendung

Prof. Dr. med. Marc Schnetzke
Zum Arztprofil

Prof. Dr. med. Markus Loew
Zum Arztprofil

Dr. med. Sven Lichtenberg
Zum Arztprofil
Die Schulterendoprothetik ist besonders dann technisch anspruchsvoll, wenn die Gelenkpfanne (Glenoid) in ihrer Form und Ausrichtung deutlich verändert ist. Bei der anatomischen Schulterprothese betrifft das häufig komplexe Glenoidmorphologien mit Retroversion, Knochenverlust und posteriorer Subluxation des Humeruskopfes. Bei der inversen Schulterprothese steht die sichere und korrekt ausgerichtete Verankerung der glenoidalen Basisplatte im Vordergrund, weil Fehlpositionierungen u. a. Instabilität, Skapulanotching oder eine unzureichende knöcherne Fixation begünstigen können. Eine exakte Positionierung der glenoidalen Komponenten ist daher bei beiden Prothesentypen wesentlich, um Lockerungen und Revisionen zu vermeiden. Die vorliegende Übersichtsarbeit gibt einen strukturierten Überblick über aktuelle Strategien der digitalen Planung und intraoperativen Unterstützung. Darüber hinaus werden Studienergebnisse zur Genauigkeit, zu klinischen Outcomes und zu Komplikationsraten zusammengefasst, um den aktuellen Stellenwert moderner Navigationsverfahren in der anatomischen und inversen Schulterendoprothetik einzuordnen.
{kind=link}
{kind=link}
{kind=link}
Die Schulterendoprothetik ist in den letzten Jahrzehnten zu einem etablierten Verfahren in der Behandlung der primären Omarthrose und weiterer degenerativer oder posttraumatischer Krankheitsbilder geworden. Trotz standardisierter OP‑Techniken bleibt der Eingriff vor allem am Glenoid anspruchsvoll, weil die Gelenkpfanne klein ist, die anatomische Variabilität hoch ist und sich bei vielen Patienten Form, Ausrichtung und Knochenqualität durch Arthrose oder Voroperationen deutlich verändern. Bei der anatomischen Schulterprothese erschweren insbesondere Glenoide der Walch‑Typen B2, B3 und C die Rezentrierung des Humeruskopfes und die korrekte Positionierung der Glenoidkomponente, da diese Glenoidtypen häufig durch eine ausgeprägte Retroversion und eine posteriore Subluxation des Humeruskopfes gekennzeichnet sind. Mehrere Studien zeigen, dass eine fehlerhafte Implantatpositionierung – vor allem eine persistierende Retroversion über etwa 15 bis 20° – mit einer erhöhten Lockerungsrate der Glenoidkomponente assoziiert ist.
Die inverse Schulterprothese hat sich parallel dazu als Standardverfahren etabliert, insbesondere bei Rotatorenmanschetteninsuffizienz, komplexen Defekten oder in Revisionssituationen. Auch hier ist die präzise Positionierung der glenoidalen Basisplatte entscheidend, weil eine ungünstige Ausrichtung und Fixation zu exzentrischer Belastung, Instabilität, Skapulanotching oder glenoidalen Problemen bis hin zur Lockerung beitragen können. Vor diesem Hintergrund wurden digitale Planungs- und Navigationssysteme entwickelt. Wichtig ist die klare Unterscheidung: Präoperative 3D‑Planung dient der patientenspezifischen Analyse und der Simulation verschiedener Implantat- und Rekonstruktionsoptionen. Intraoperative Navigation unterstützt die Umsetzung dieser Planung im Operationssaal, indem sie Position, Winkel und Tiefe der Instrumente und Implantate in Echtzeit kontrollierbar macht.
Lockerungsraten und Revisionsrisiko
Lockerungen glenoidaler Komponenten gehören weiterhin zu den wichtigsten Komplikationen in der Schulterendoprothetik. Für die anatomische Prothese wurden in der Literatur bei bikonkaven Glenoiden Lockerungsraten von bis zu 20,6 % beschrieben [10]. Registerdaten wie das australische Endoprothesenregister (AO-ANJRR) berichten über eine 10‑Jahres Revisionsrate von 7,5 % für anatomische Schulterprothesen im Vergleich zu 5,5 % bei inversen Prothesen [2]. Diese Zahlen verdeutlichen, dass die anatomische Prothese besonders anfällig ist, wenn die Glenoidgeometrie deutlich vom physiologischen Zustand abweicht.
Bei der inversen Prothese sind die Gründe für Revisionen teilweise anders verteilt, doch bleibt die glenoidale Fixation ein zentraler Erfolgsfaktor. Fehlpositionierte Basisplatten können die Schraubenverankerung ungünstig beeinflussen, die Lastübertragung exzentrisch machen und Folgeprobleme begünstigen. Entsprechend zielen moderne Technologien bei beiden Prothesentypen darauf ab, Version und Inklination möglichst präzise umzusetzen und eine stabile knöcherne Verankerung zu erreichen, ohne unnötig Knochen zu opfern.
Aktuelle Möglichkeiten der Planung, Navigation und Robotik
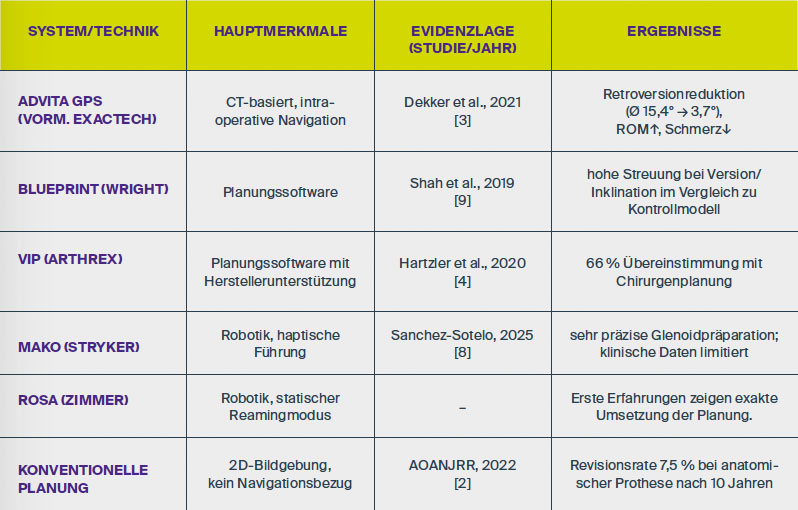
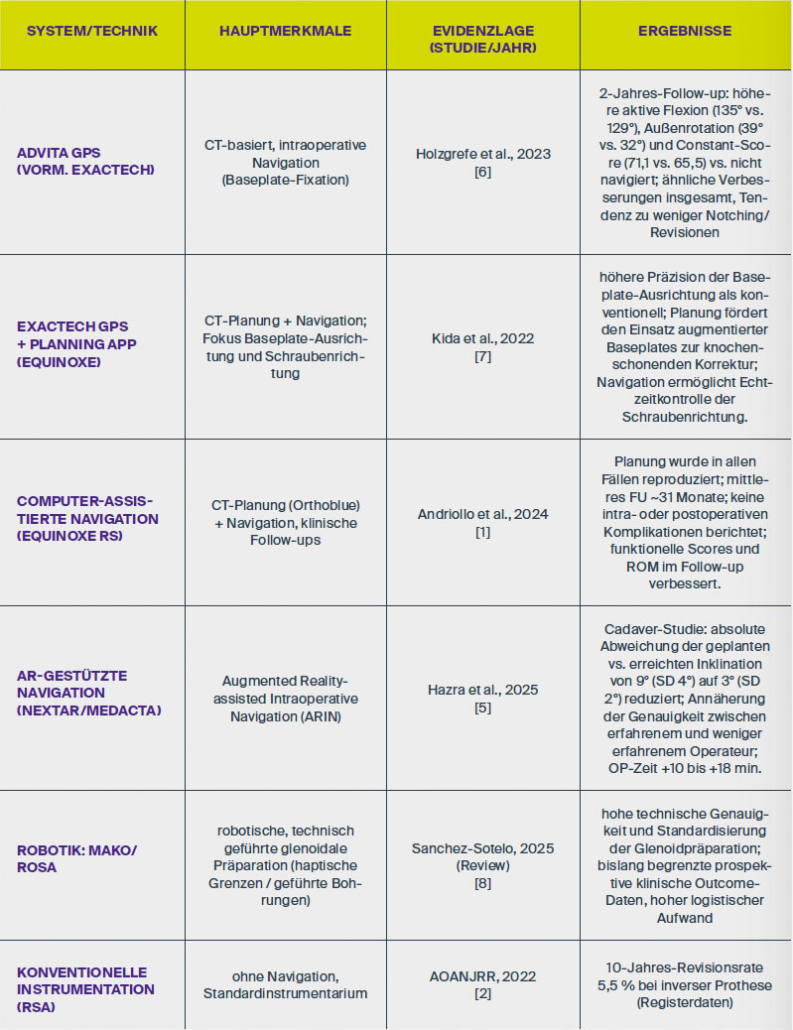
Die heute verfügbaren digitalen Werkzeuge lassen sich in drei Hauptkategorien einteilen: präoperative Planungssoftware (häufig CT‑basiert), intraoperative Navigationssysteme und robotergestützte Assistenzsysteme (Tabelle 1 und 2). Die Planungssoftware wie „Blueprint“ oder „VIP“ erstellt aus CT‑Daten ein dreidimensionales Modell der Skapula und erlaubt die Analyse von Glenoidversion, Inklination, Knochenverlust und Humeruskopfposition. Darauf basierend werden Komponentengröße, Reamingtiefe, Augment‑Optionen und Rekonstruktionsstrategien simuliert. Dabei zeigen Vergleichsstudien, dass die berechneten Parameter je nach Software variieren können (Shah et al.). Zur Umsetzung der Planung kommen je nach Konzept patientenspezifische Instrumente (PSI) oder Transferinstrumente (z. B. wiederverwendbare „Kalibratoren“) zum Einsatz.
Die intraoperative Navigation überträgt die präoperative Planung in den Operationssaal. Über optische Trackingsysteme und knöchern fixierte Referenzmarker werden Instrumente und Implantate in Echtzeit im Raum erfasst. Dadurch können Version, Inklination, Reamingtiefe sowie die Richtung von Bohrungen und Schrauben kontrolliert und dokumentiert werden. Die robotischen Assistenzsysteme kombinieren Planung und technisch geführte Präparation, beispielsweise durch haptische Grenzen oder definierte Bohr-/Fräsbahnen. Für die Schulter wurden in den letzten Jahren insbesondere Robotikplattformen für die glenoidale Präparation bei der primären inversen Prothese beschrieben.
Evidenz und klinische Einordnung
Die bisher publizierten Daten unterstützen die Annahme, dass Navigation die Umsetzung der präoperativen Planung am Glenoid verbessern kann. Für die anatomische Prothese zeigt die Studie von Dekker et al., dass navigationsassistierte Implantation die mittlere Glenoidretroversion deutlich reduzieren kann (von 15,4° auf 3,7°) und dass dies mit verbesserten klinischen Parametern einhergeht [3].
Für die inverse Prothese liegt eine wachsende Evidenzbasis vor, die sowohl Genauigkeits‑ als auch Outcome‑Parameter umfasst. In einem gematchten Kohortenvergleich belegten Holzgrefe et al. bei navigierter RSA nach durchschnittlich rund 33 Monaten Follow‑up bessere absolute Werte für Vorwärtshebung, Außenrotation und den Constant‑Score, wobei die Verbesserungen gegenüber dem Ausgangszustand zwischen den Gruppen ähnlich waren [6]. Studien zur Plantreue und Präzision (z. B. Kida [7]) zeigen, dass Navigation die Baseplate‑Ausrichtung reproduzierbarer an das präoperative Ziel annähert und zusätzlich die sichere Schraubenrichtung in Echtzeit kontrollierbar macht. Neue Ansätze wie Augmented‑Reality‑Navigation können die Präzision bestimmter Parameter (insbesondere Inklination) weiter erhöhen, gehen aber derzeit mit einer längeren Operationszeit einher [5]. Robotische Systeme gelten als nächste Entwicklungsstufe, da sie die Präparation technisch begrenzen und standardisieren können. Bislang fehlen jedoch in der Schulter umfangreiche prospektive, randomisierte Vergleiche, die einen klinischen Vorteil gegenüber Navigation eindeutig belegen. Zusätzlich spielen Kosten, Logistik und Schulungsaufwand eine relevante Rolle für die breite Implementierung.
Humerale Rekonstruktion
Neben der glenoidalen Rekonstruktion ist auch die humerale Präparation wesentlich/entscheidend für das funktionelle Ergebnis. Die korrekte Rekonstruktion von Humeruskopfgröße, Offset und Neigung beeinflusst Weichteilspannung, Beweglichkeit und Gelenkzentrierung. Erste Studien deuten darauf hin, dass navigationsgestützte Verfahren auch hier zu einer verbesserten Reproduzierbarkeit beitragen könnten; die klinische Relevanz wird jedoch noch weiter untersucht.
„Moderne Navigationsverfahren haben das Potenzial, die Präzision der glenoidalen Implantatpositionierung zu verbessern.“
Prof. Dr. med. Marc Schnetzke
Diskussion
Die intraoperative Navigation bietet gegenüber der konventionellen Implantation mehrere potenzielle Vorteile: Sie kann die Reproduzierbarkeit verbessern, Planungs- und Umsetzungsfehler reduzieren, die Implantatplatzierung besser kontrollierbar machen und den Eingriff objektiv dokumentieren. In komplexen Glenoidverhältnissen zeigt sich ein klarer Nutzen hinsichtlich der Genauigkeit, was plausibel zur Komplikationsvermeidung beitragen kann.
Gleichzeitig sollten Limitationen nicht übersehen werden. Die Qualität der präoperativen Planung hängt von der verwendeten Software ab; zwischen verschiedenen Systemen wurden relevante Unterschiede beschrieben. Die Navigation verlängert die Operationszeit in vielen Serien im Mittel um etwa 15 bis 25 Minuten, was insbesondere bei älteren oder multimorbiden Patienten berücksichtigt werden sollte. Zukünftige Entwicklungen könnten durch die Integration von künstlicher Intelligenz, Mixed Reality und dynamischer intraoperativer Weichteilanalyse geprägt sein. Erste Pilotstudien und experimentelle Arbeiten lassen erwarten, dass die Systeme intuitiver werden und bestimmte Fehlerquellen weiter reduziert werden können.
Fazit
Moderne Navigationsverfahren haben das Potenzial, die Präzision der glenoidalen Implantatpositionierung in der Schulterendoprothetik zu verbessern – sowohl bei der anatomischen als auch bei der inversen Prothese. Insbesondere bei komplexer Anatomie und relevantem Knochenverlust können präoperative 3D‑Planung, Navigation und ergänzende Assistenzsysteme die Umsetzung definierter Zielparameter unterstützen. Für die inverse Prothese spricht die aktuelle Literatur zusätzlich für eine verbesserte Plantreue und teils bessere absolute funktionelle Ergebnisse in frühen Follow‑ups, während der Nachweis einer langfristigen klinischen Überlegenheit (z. B. geringere Lockerungs‑/Revisionsraten) weiterer standardisierter Studien bedarf. Robotische Systeme sind vielversprechend, müssen aber im klinischen Nutzen und in der Kosteneffektivität noch besser evaluiert werden.
Dieser Beitrag ist die gekürzte und überarbeitete Version eines Beitrags in der „Oberen Extremität“: Schnetzke, M., Loew, M. & Lichtenberg, S. Intraoperative Navigation in der anatomischen Schulterendoprothetik.